Sep 16, 2020
New technologies for EV charging

Nowadays almost all of EV-charging in the electric mobility world is done in the same way:power flows from the electric network to the car battery through a charging cable. However, there are other emerging technologies which not everyone is aware of. Some of them are still under study, some are already in the experimental stage. In general, anyway, they all share the same basic idea: to automate charging.
So let us see in detail what are the main technologies by which is and will be possible to charge our electric car.
Conductive charging via cable
Let us start with the state-of-the-art today. Conductive charging via cable is the manual connection of a conductor between charging station and vehicle. Electric current flows in this wired connection and can also allow very high charging power, depending on the cable size.
The main advantages of this type of charging are:
Reduced cost of the infrastructure
High efficiency in power transfer
Possibility of very fast charging (but with rising costs)
Low maintenance required
Practically zero electromagnetic emissions
The main disadvantages of this type of charging are:
Need for human intervention for the connection, with all the disadvantages of a non-automated process
Cluttering of the parking area with the cable
Incompatibility with self-driving vehicles
Due to all the above mentioned advantages, conductive charging will certainly remain in use for many years to come. Most likely, to overcome the disadvantages, in a very near future this technology will combine with systems that provide for different types of automation. We see below the best known solutions.
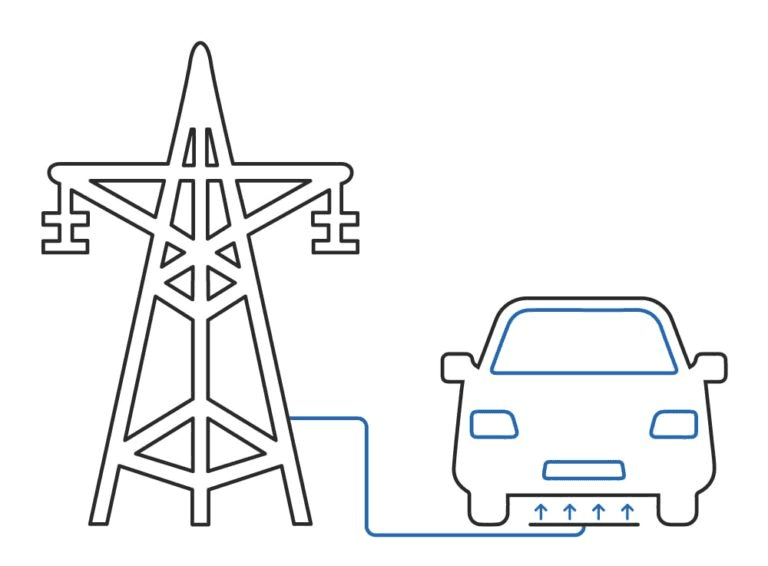
Inductive charging or wireless
Inductive charging, commonly known as wireless charging, consists of a transfer of energy from the charging station to the vehicle without using a cable, but through magnetic fields. Two conductive coils, one placed under the car body and the other installed at the center of the charging station, are electromagnetically coupled. Exploiting the electromagnetic induction principle, the coil on the ground generates very strong alternating magnetic fields that induce currents in the coil placed under the car. These currents allow the vehicle to be recharged.
Even though wireless charging may seem to be conceptually the definitive solution for charging automation, its technical implementation generates so many problems that it has led most of the companies that have ventured into this type of projects to abandon them.
In fact the typical problems of inductive systems, that are almost negligible at low powers (just think about popular mobile chargers), are much more relevant when charging at high powers and generate side effects hardly acceptable by the user.
These problems all derive from two main causes: infrastructure and efficiency.
Infrastructure problems
As we said before, inductive charge systems have two conductive coils traversed by strong high frequency alternating currents. However, these currents must be generated from classic supply power that comes from the network. The infrastructure required to generate these currents is extremely complex and expensive. Not only that: the coils are also made of very heavy and expensive materials.
Hence, the following set of problems:
Too high costs of the structure
Too much weight and space occupied in the car
Difficulty in reaching high charging powers
Need to have plates of small dimensions with related precision problems when parking
Efficiency problems
Inductive electricity transfer systems involve the presence of free magnetic fields in the air. Such features, together with the need of generating a strong alternating current, makes them particularly inefficient. These electricity losses, that in the best conditions rarely drop below the 10 percent of the total energy, turn into strong emissions of electromagnetic fields and heat the coils.
Large waste of energy when charging
Potentially dangerous emissions of electromagnetic fields near the vehicle
Strong heating of the plates that become dangerous for people and animals
Need to park precisely in order to ensure the perfect alignment of the coils so as not to cause further increases in losses
So in conclusion, inductive charging systems eliminate the need for human intervention but generate several additional problems. That is why today there is no extensive use of this system but for a few pilot projects for limited specific uses. For years technology has been looking for concrete solutions to these problems but the results are still not satisfactory enough. We will see if in the future the situation will improve.
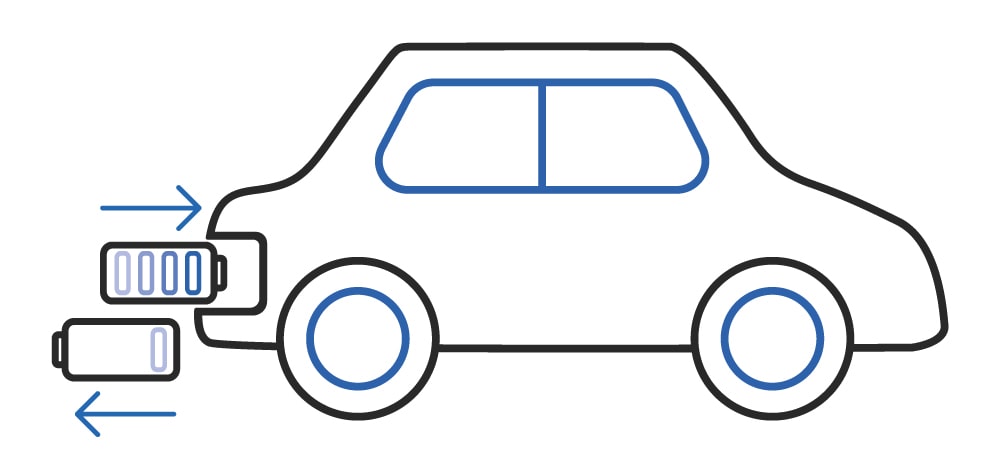
Battery Swap
Technically, battery swap is not a real charging technology because it is nothing more than a replacement of batteries in specific housings. At these placement points, through an automated system, the battery to be charged is removed and replaced with an already charged one.
Notwithstanding its incredibly quick “charging time” this type of system is not in widespread use due to the enormous cost of the exchange infrastructure and to the need of a common standard for all batteries of every different EV.
To date, contrary to all major car manufacturers, only the Chinese NIO decided to prepare its vehicles for battery replacement.
Conductive automatic charging systems
Conductive automatic charging systems arise from the intent of automating the charging process without however creating the typical problems of inductive power transfer. These systems always involve a more or less simple robotic system that connects a connector to the vehicle creating a wired connection between the charging station and the vehicle itself. To date there are only prototype versions for these system but we will probably see the first launches of the commercial versions in the next two or three years.
Conductive automatic charging systems fall into two categories: from under the vehicle and from the side. Let see in detail.
Conductive automatic charging from the side
A conductive automatic charging system from the side is typically an anthropomorphic robot installed near a parking area which performs the action of inserting a standard connector into the classic charging socket of the vehicle, exactly like a human would.
These systems, compared to those from under the vehicle, are much bulkier and complex. They are bulky because the robotic arm moves on the side of the vehicle until it gets to the standard charging socket: They are complex because, while orientation relative to the ground under the vehicle is always known, the orientation relative to the ground of a classic charging socket of the vehicle must be measured by vision systems with camera and the robot needs to have enough degrees of freedom in order to be able to align in all conditions. On the other hand, this robot larger size allows you to use cables with larger sections, that is why the side charging systems perform charging at higher powers than those from under the vehicle.
A typical use case is when frequent high power charging is required and a huge initial investment is acceptable. These solutions are meant for heavy vehicles or self-driving vehicles where a reduction of downtime and human intervention allows significant cost savings.

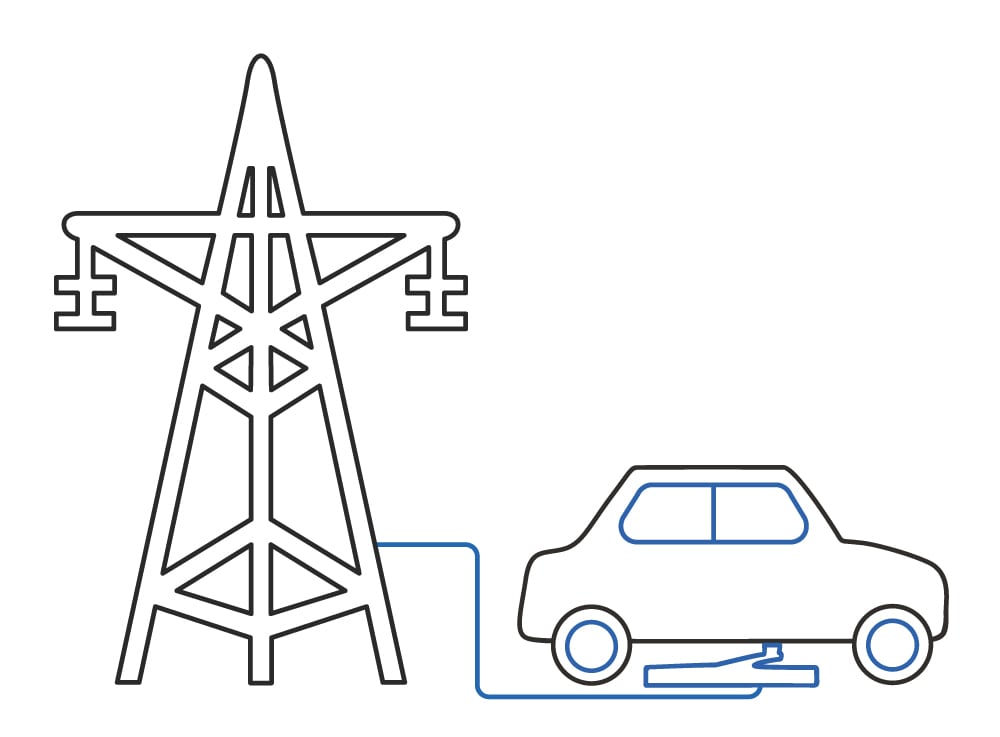
Conductive automatic charging from under the vehicle
A conductive automatic charging from under the vehicle consists of a robot installed at the center of a parking area, small enough to allow to park over it. Once the vehicle has stopped over the robot, the latter is able to move and connect to the socket installed under the vehicle, establishing a wired connection.
With these systems, centering the connector with the socket is much easier if compared to the automatic system with side charging, that is the reason why they are cheaper and less complex. Their small dimensions, imposed by the need to stay under the vehicle, allow a fast charging but not up to the power levels of the automated system with side charging.
A typical use case is when you need, with a limited investment, to automate charging and reducing the volume of the system but high power charging is not required. These solutions are meant for daily private charging which usually takes place at night and with low power.
Conductive autonomous systems from under the vehicle are the direct alternative to wireless charging systems. Conductive systems offer to the driver an identical usage experience, but they solve most of the typical problems of inductive systems:
Infrastructure costs are significantly reduced
Weight and space occupied on the vehicle are reduced
Power levels needed for fast charging are easily reached
Robotic centering corrects parking errors.
Wired connection minimize energy waste resulting from the low efficiency of inductive systems
Electromagnetic fields emissions are eliminated
There are no exposed high temperature plates
Regardless of accuracy in parking, maximum charging efficiency is achieved
On the other hand, the movement of a robotic system might sometimes be unreliable and require more maintenance. If these systems will succeed or not on the market, will depend on the goodness of their technical implementation in terms of reliability and reduced maintenance.
Dazetechnology has been developing Dazeplug since 2016 which is to date one of the most advanced, conductive automated charging systems from under the vehicle in terms of implementation. The arrival of this system on the market passes by the adoption of such a solution by a car maker and then from the preparation of vehicles in order to operate with this system. It is likely that we will see this type of solution on the market starting in 2023.
Purchase your EV Charger
Our expert will contact you to offer you the most suitable solution for you.